Transfer learning - Traffic lights
Category: Computer Vision, Deep learning, Object detection
Overview
The goal of this project is to apply transfer learning to a pre-trained faster-rcnn model for traffic light detection.
- Environment:
- Python 3.6
- Tensorflow 1.10.0
- CUDA 9.0
- Dataset
- LISA traffic light dataset
- pre-trained Model
- Faster_RCNN_inception_v2_coco
Pre-procession
The dataset contains several sub-folders with images and csv files of annotation. To better feeding into object detection API, it is necessary to transfer the images into record files with features.
- Dictionary & pbtxt
# The annotation dictionary for tf records and for pbtxt.
annotation_dict = {"go":1, "warning":2, "stop":3, "goLeft":4, "warningLeft":5, "stopLeft":6, "goForward":7}
# Label_map generation
# Exporting the label_map.pbtxt with the dictionary previous generated.
# Uncomment if needed
with open ("PATH_TO_PBTXT/label_map.pbtxt", 'w') as file:
for key in annotation_dict.keys():
file.write("item {\n id: %i\n" %(annotation_dict[key]+1))
file.write(" name: '%s'\n}\n\n" %key)
- Train/valid ratio
DATA_PATH = 'TOP_LEVEL_FOLDER'
TRAIN_PATH ='TRAINING_folder' # path to dayTrain
TRAIN_RATIO = 0.7
- Features Each row of the CSV file corresponds to a bounding box of an image. But, there could be several bounding boxes in an image so it is not proper to do per row read-in. Here I use class to registry files and put them into a list for following train/valid split.
class single_record:
'''
A class for the tf_example protos.
The image data is not loaded and the values are not featurized
'''
def __init__(self):
self.xmins = []
self.xmaxs = []
self.ymins = []
self.ymaxs = []
self.classes_text = []
self.classes = []
# self.encoded_image_data = None
self.height = 0
self.width = 0
self.filename = None
def record_generator(records, writer):
'''
Create tf records from tf_example prototypes.
Param :
records - a list of tf_example protos (class single_record)
writer - the corresponding tf.writer mapped with the flags
Return :
None but creating two tfrecords file
'''
image_format ='png'.encode()
for record in records:
# record = records[0]
with tf.gfile.GFile(record.filename, 'rb') as fid:
encoded_image_data = fid.read()
# print("encode ok")
filename = record.filename.encode()
# print("filename ok", filename)
tf_example = tf.train.Example(features=tf.train.Features(feature={
'image/height': dataset_util.int64_feature(record.height),
'image/width': dataset_util.int64_feature(record.width),
'image/filename': dataset_util.bytes_feature(filename),
'image/source_id': dataset_util.bytes_feature(filename),
'image/encoded': dataset_util.bytes_feature(encoded_image_data),
'image/format': dataset_util.bytes_feature(image_format),
'image/object/bbox/xmin': dataset_util.float_list_feature(record.xmins),
'image/object/bbox/xmax': dataset_util.float_list_feature(record.xmaxs),
'image/object/bbox/ymin': dataset_util.float_list_feature(record.ymins),
'image/object/bbox/ymax': dataset_util.float_list_feature(record.ymaxs),
'image/object/class/text': dataset_util.bytes_list_feature(record.classes_text),
'image/object/class/label': dataset_util.int64_list_feature(record.classes),
}))
# print("tf_example ok")
writer.write(tf_example.SerializeToString())
writer.close()
Config
- Model
In the model section, I chose not to resize the input images and to keep the anchor size. For smaller objects, like the traffic light bulbs, I would change the anchor to 64x64. As for the max detections per class and total detections, 10 is pretty enough for most cases on the road.
* fixed_shape_resizer
- height:960
- width: 1280
* grid_anchor_generator
- height:128
- width: 128
* max_detections_per_class: 10
* max_total_detections: 10
- Train_config
The initial learning rate is set at 0.00002. It is lower that the default value but I get the chance to see if something like overfitting showing during the training via monitoring the loss curve.
* initial_learning_rate: 0.00002
* from_detection_checkpoint: true
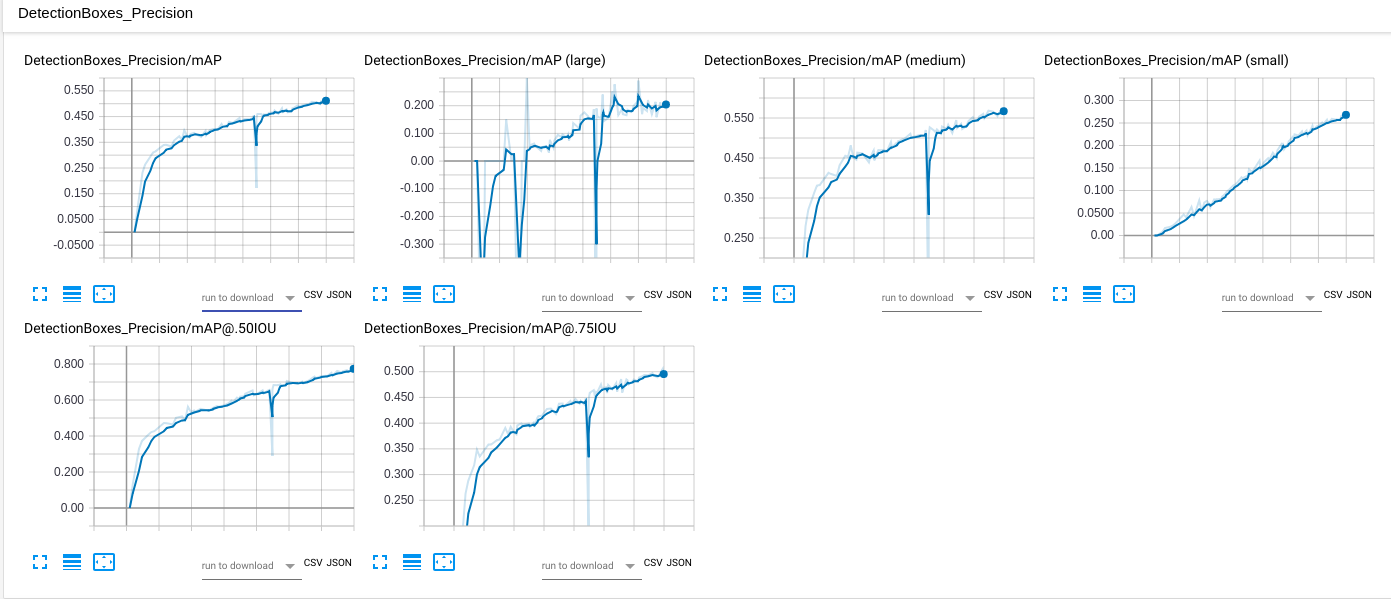
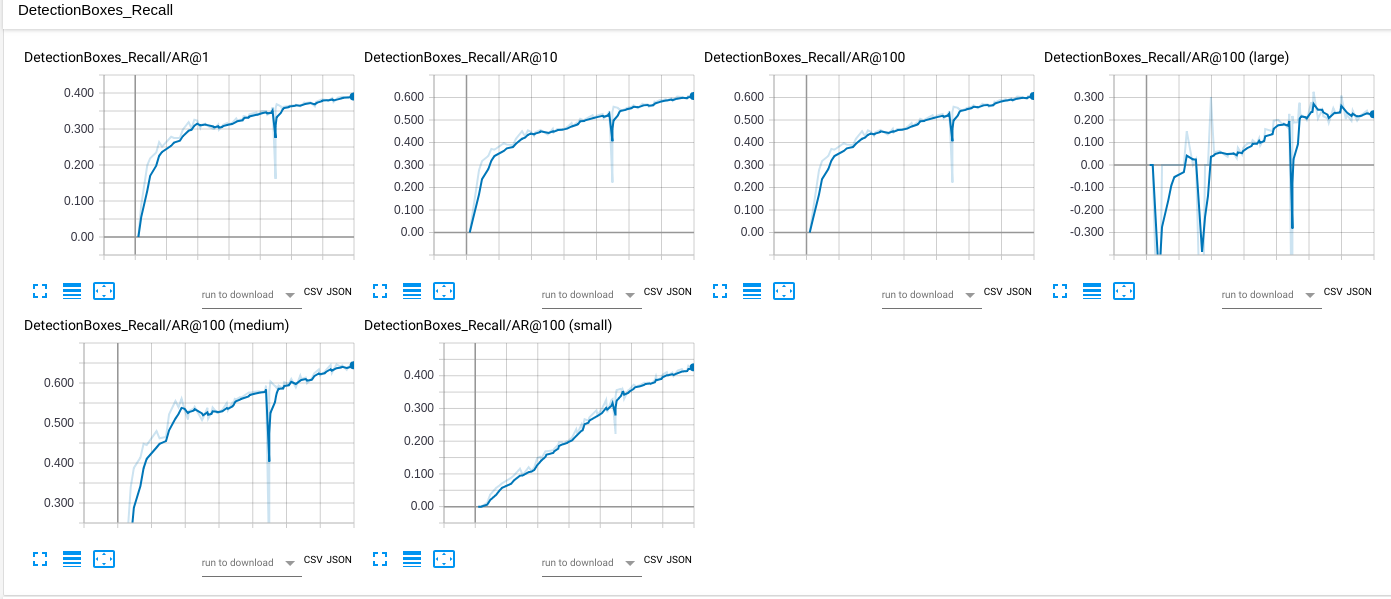

- The dipping in the middle of the training is due to wrong dataset imported after break/resume
Screenshots
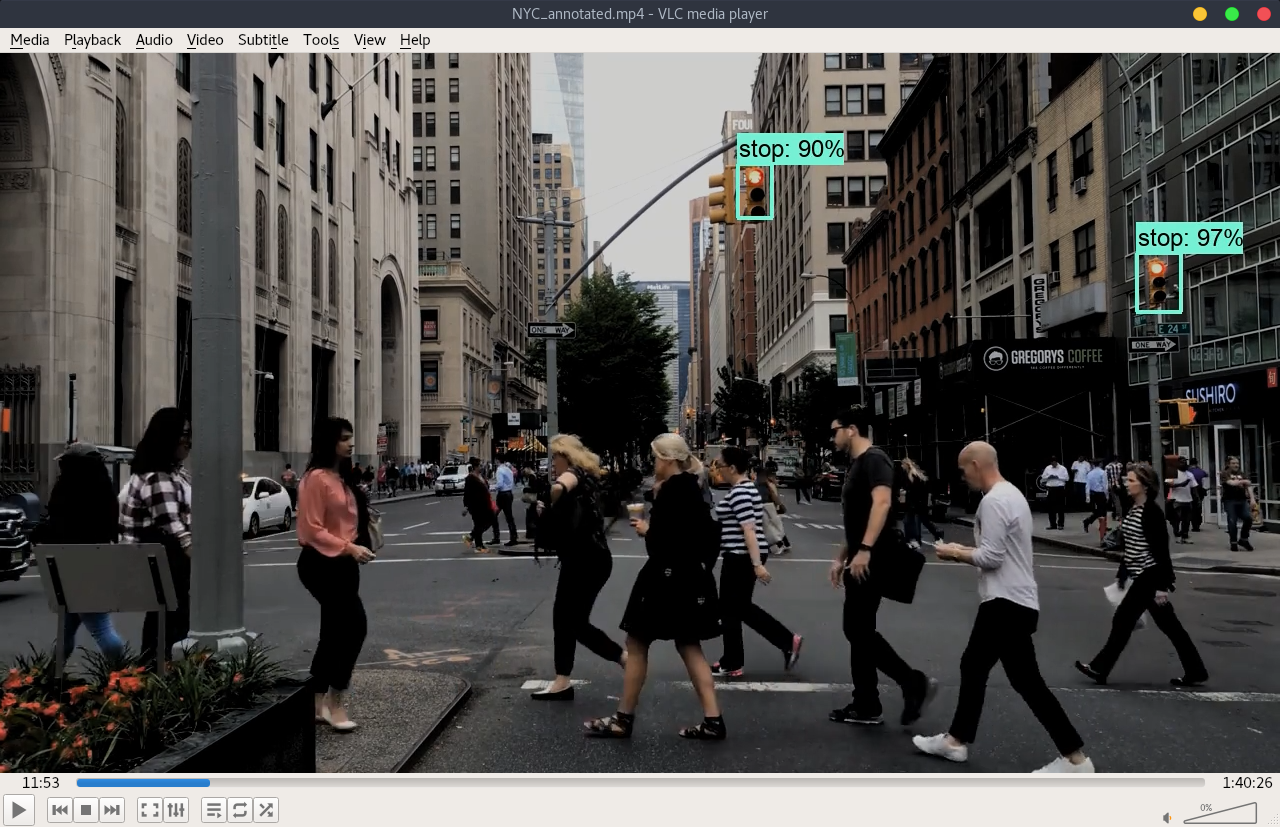
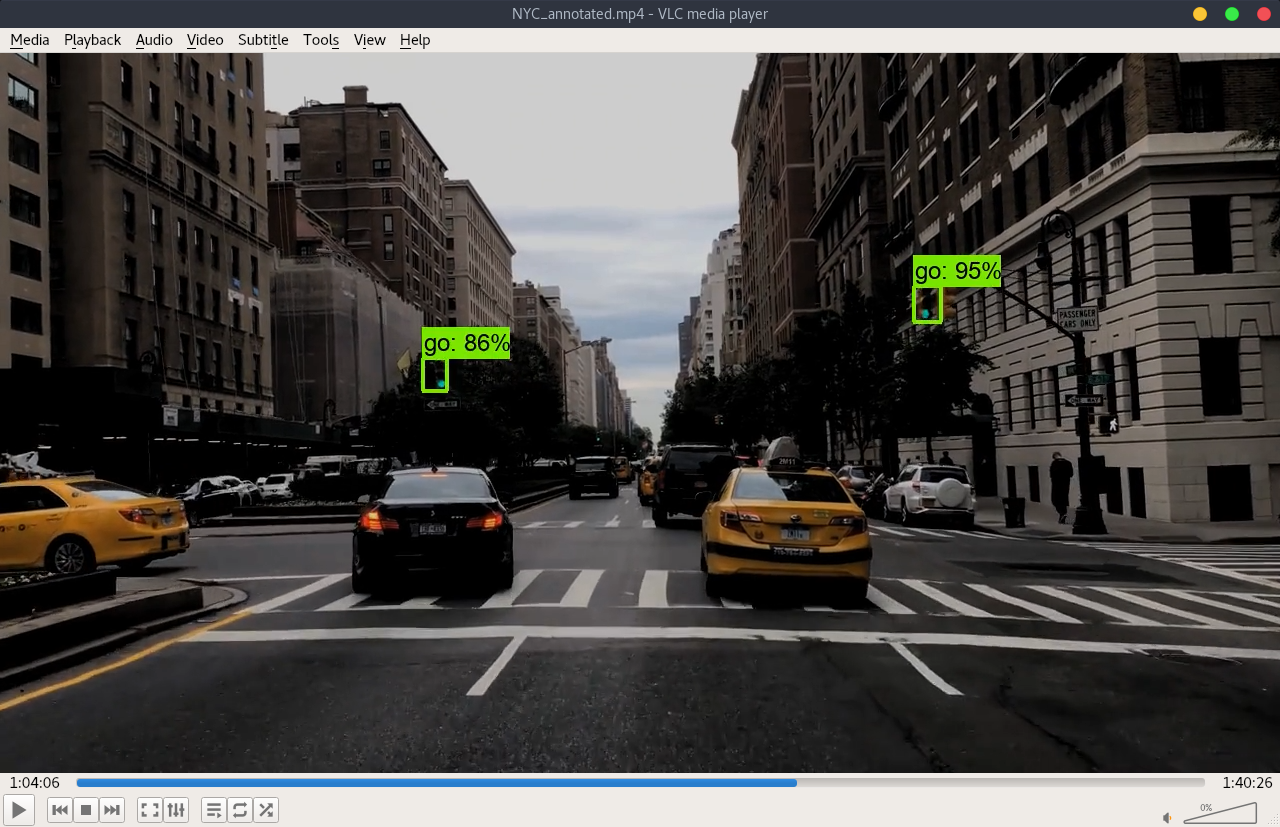
Here I took three youtube driving videos of three different cities (Chicago, NYC and SF), made annotated version of them and took some screenshots showing below. If interested, the links to the annotated videos is also attached for references.
Please note the images and the annoted video are darker than the original files. This is a trick to compensate the exposure since most of the videos have weighted-average exposure and the traffic lights could be over-exposure.
During the visualization, the min_score_thresh is set at 0.85 to reduce the noises and false detections.
- NYC
- Original video link: https://www.youtube.com/watch?v=kBleVYw_MDs
- Chicago
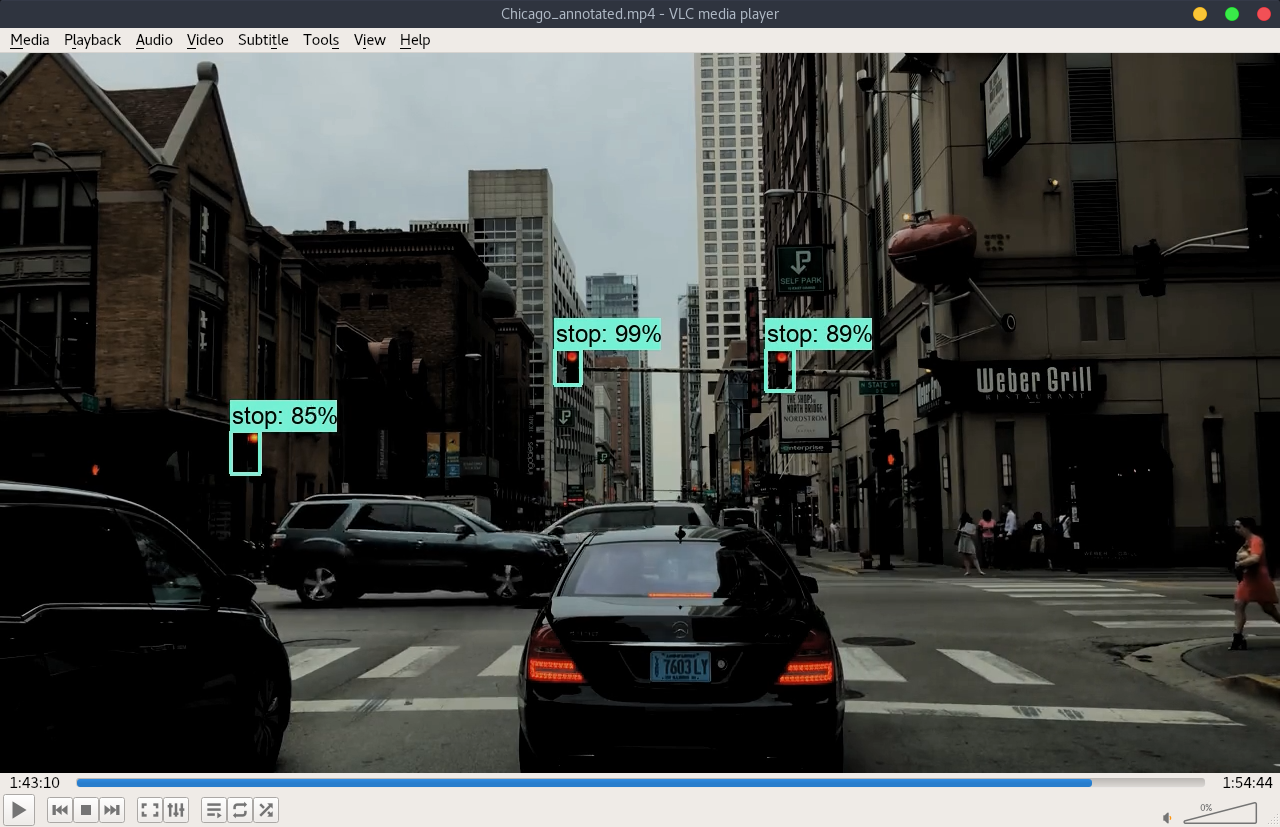
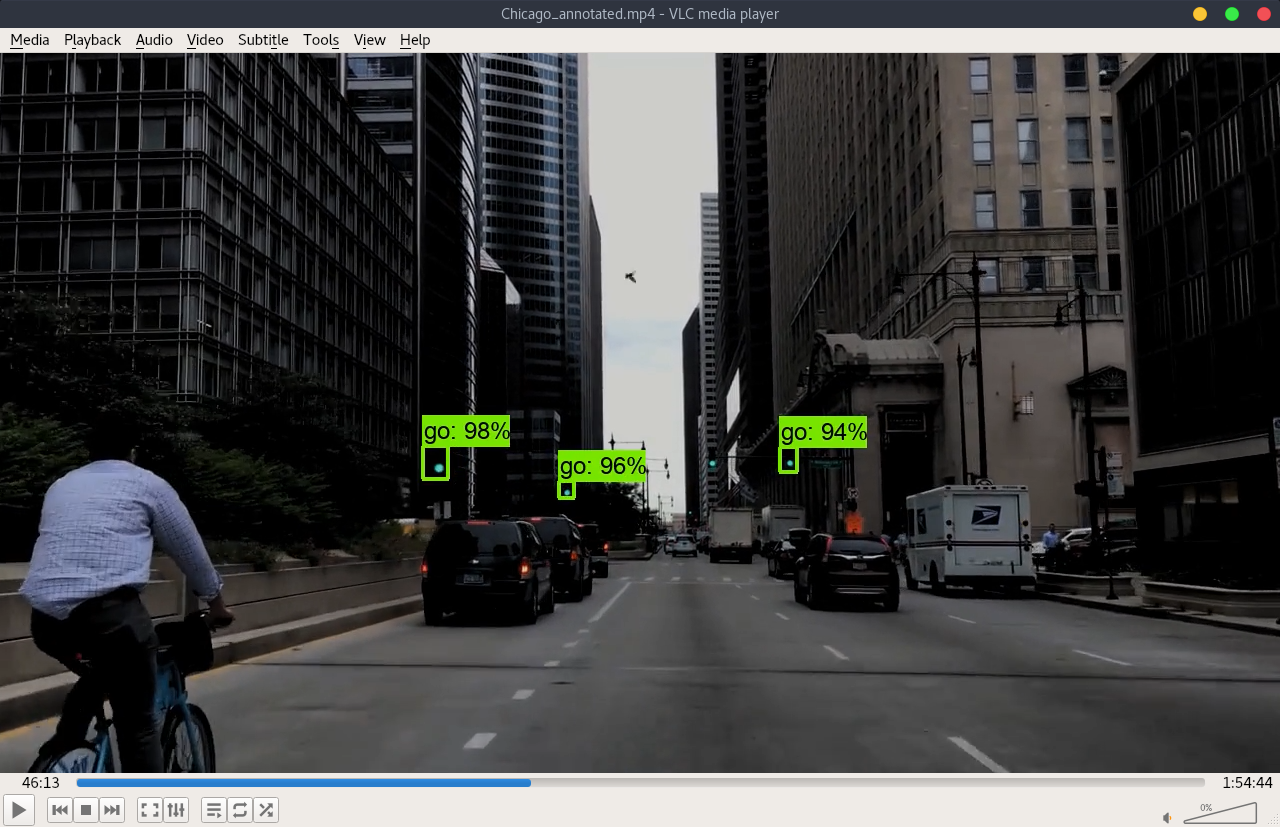
- Original video link: https://www.youtube.com/watch?v=kOMWAnxK
- SF
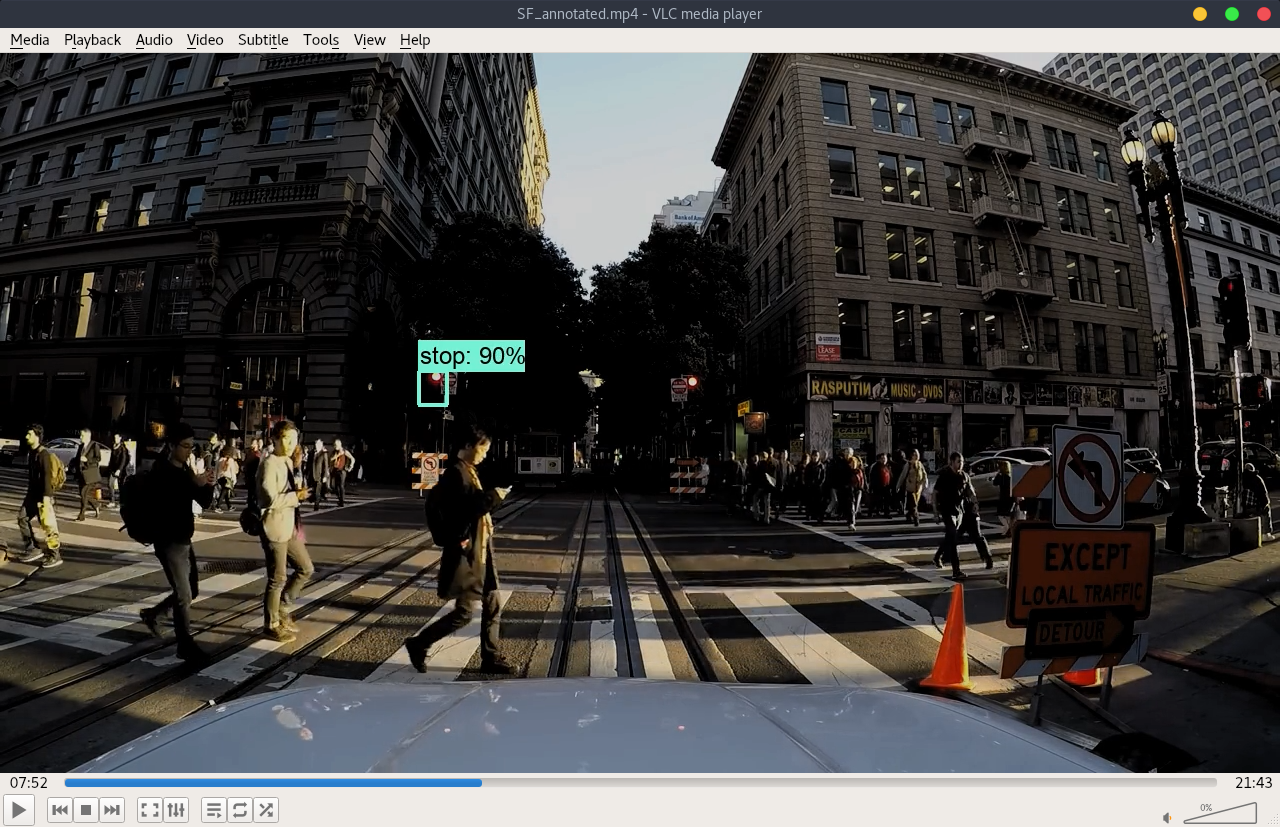
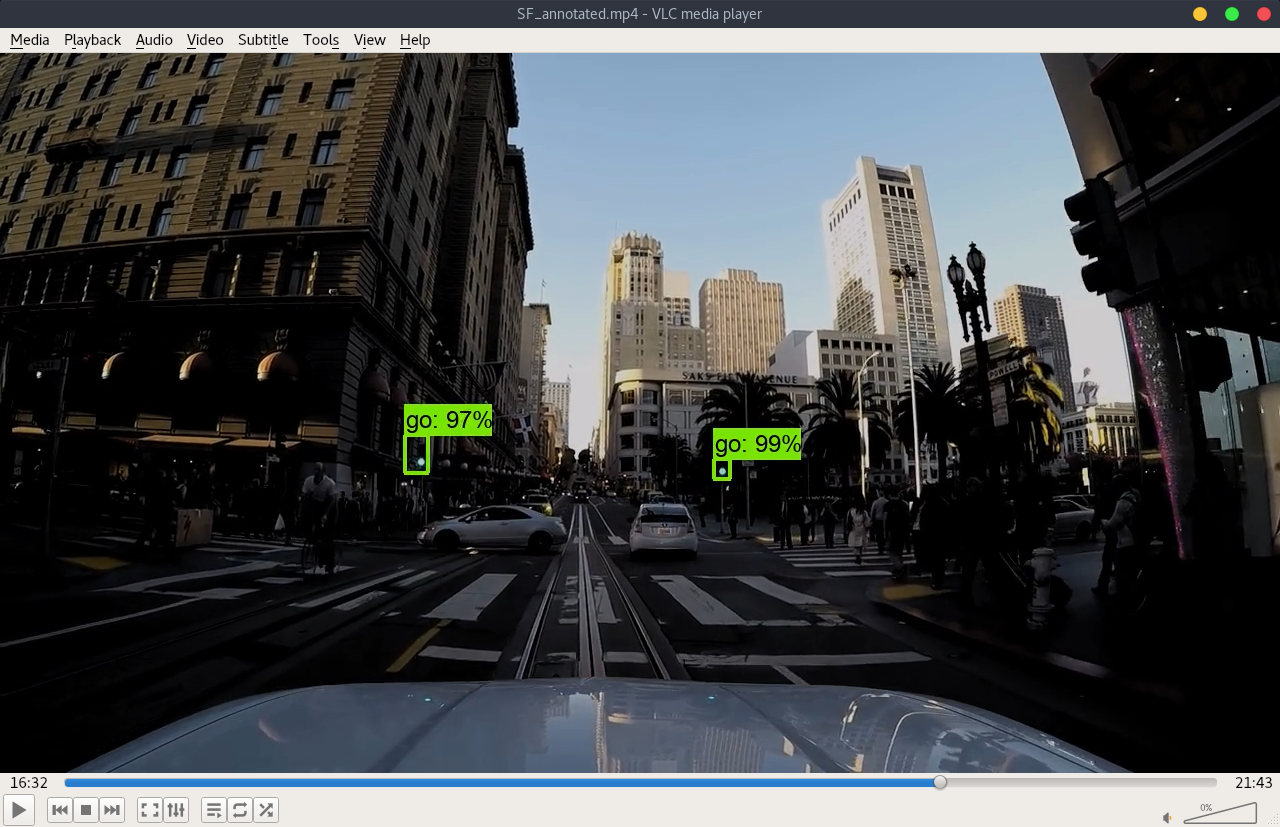
- Original video link: https://www.youtube.com/watch?v=DA7uu_wrnQ4
- Click on the last image for the actual video of NYC.
Results
Despite the result in the screenshots above look promising, the real time detection accuracy is not great. This reflects the lower mAP and Regression results above. With longer training time, I expect to have better result. Plus, as one can found in the video, the car moves in slow-motion due to lower detection speed.
My next step to this model is to apply it to a my cozmo robot and see how it goes!
Citation
Morten Bornø Jensen, Mark Philip Philipsen, Andreas Møgelmose, Thomas B Moeslund, and Mohan M Trivedi. “Vision for Looking at Traffic Lights: Issues, Survey, and Perspectives”. In: IEEE Transactions on Intelligent Transportation Systems (2015).
Mark Philip Philipsen, Morten Bornø Jensen, Andreas Møgelmose, Thomas B Moeslund, and Mohan M Trivedi. “Learning Based Traffic Light Detection: Evaluation on Challenging Dataset”. In: 18th IEEE Intelligent Transportation Systems Conference (2015).